Graph Embodiment Transformer (GET)
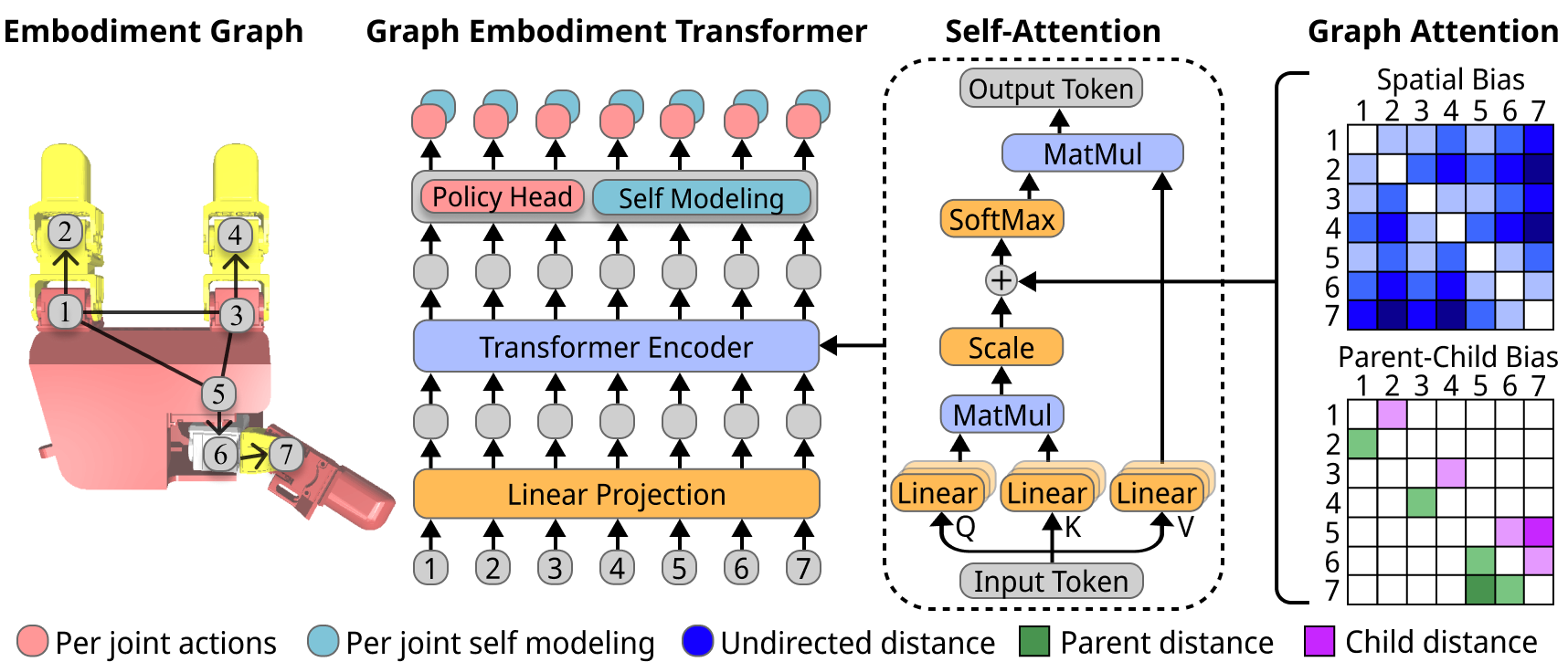
GET is an embodiment-aware model architecture based on the transformer encoder that conditions on the robot hardware structure to zero-shot control new robot designs. The main idea is to leverage the embodiment graph (left), with joints as nodes and links as edges, as a structural bias in the attention mechanism (right). And by operating on per-joint tokens containing local hardware properties and observations, GET flexibly adapts to robots with varying number of joints and graph structures. GET also performs per-joint forward kinematics prediction as a self-modeling meta-task, which empirically improves cross-embodiment transfer.